
机器人有时难以理解“抓取”的概念。情况很糟糕,甚至一个幼儿的运动技能也通常比一些最先进的机器人要发达得多。例如,人类本能地就能轻松拿起一个鸡蛋,而 机器人 通常在不消耗过多能量的情况下,努力计算力与操控的复杂性。为了解决这个问题,剑桥大学的研究人员最近通过精简机械手的功能,找到了一种新颖的解决方案。
正如发表在 《高级智能系统》 杂志上的一篇论文所述,该团队开发了一种低成本的机械手,能够通过嵌入其“皮肤”中的传感器被动地抓取和握持各种物体。更重要的是,它不需要任何手指关节即可完成任务,从而极大地简化了其设计、编程和能源需求。
“我们希望尽可能地简化手部,”该大学仿生机器人实验室教授、论文合著者之一 Fumiya Iida 在一份声明中 表示。“我们可以在没有任何执行器的情况下获得大量有用的信息和高度的控制,这样当我们添加执行器时,我们就能在更高效的结构中实现更复杂的功能。”
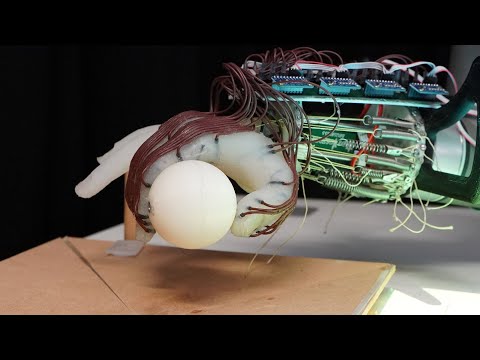
为了实现这一目标,研究人员首先在一只柔软的、3D 打印的、只能通过手腕移动的仿生手中植入了触觉传感器。然后,团队进行了 1200 多次测试,以研究其抓取和握持能力。其中许多测试的重点是通过模仿人类预设的动作来拾取小型 3D 打印塑料球。在塑料球之后,这只手开始尝试拾取气泡膜、电脑鼠标,甚至一个桃子。根据他们的结果,这只手成功地抓取了 14 个附加测试对象中的 11 个。
[相关: 人类大脑必须超负荷工作才能在乒乓球比赛中击败机器人。]
根据第一作者 Kieran Gilday 的说法,该团队的机器人附肢会随着时间推移学习哪些手腕运动和传感器数据组合会导致成功或失败,并根据需要进行调整。“这只手非常简单,但它可以利用相同的策略来拾取很多物体,”他们在声明中说。
虽然远非完美,但这种简化的机械手在各种环境和行业(例如制造业)中可能都很有用。展望未来,研究人员希望通过将其与计算机视觉相结合,并教会它“利用环境”来抓取更广泛的物体,从而进一步扩展机械手的功能。
