
像 波士顿动力公司的 Spot 和 猎豹 这样的四足机器人,它们几乎所有的敏捷性都依赖于精巧的足部动作。虽然它们在视觉上可能与哺乳动物的运动方式非常相似,但解剖学上的灵感在很大程度上仅限于它们的腿部。然而,在生物学中,四足动物的运动、灵活性和复杂的运动功能几乎完全源于其脊柱。在机器人中复制这种由椎骨堆叠组成的复杂系统,比复制腿部要困难得多——但如果能够将人工脊柱集成到这类设计中,工程师们就能开辟出全新的精准机动性途径。
[相关:新的尾部配件能推动这款机器狗跨越溪流。]
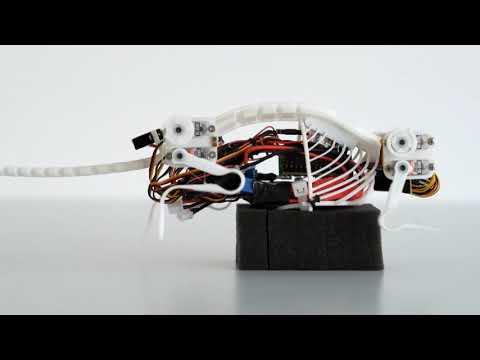
现在,得益于一个研究团队非常逼真、模仿啮齿动物设计的机器人,工程师们在脊柱中心设计的四足机器人方面取得了更进一步的进展。周三,来自德国和中国的合作者在《Science Robotics》杂志上发表文章,展示了 NeRmo,这是一款仿生四足机器人,它依靠新颖的电机-肌腱框架在环境中快速移动。
就外观而言,NeRmo 模仿了老鼠的骨骼系统——尽管耳朵很可爱,但可能不是必需的。机器人硬质的前半部分容纳了其电子系统,而后半部分的功能则类似于真实的柔性脊柱,拥有四个腰部和侧向关节。穿过脊柱以及机器人肘部和膝关节的人工肌腱,使得 NeRmo 能够进行更像老鼠的动作,同时转向速度更快。
据慕尼黑工业大学、纽伦堡技术大学和中国中山大学的合作者称,NeRmo 的肌腱-滑轮系统无需肌肉即可实现平稳的屈曲能力,可以在侧向和矢状面(即左右和上下)进行运动。
为了测试他们的这项新设计,研究团队让 NeRmo 完成了一系列四项实验,以展示静态平衡、直线行走、敏捷转弯和迷宫导航。每项试验都包含两轮——一轮启用脊柱系统,另一轮禁用脊柱系统。结果显示,在所有任务中,当 NeRmo 集成了脊柱进行运动时,它的表现更好、更快、更准确。
然而,迷宫导航是 NeRmo 的真正亮点。当启用脊柱后,这款“老鼠机器人”完成迷宫奔跑的平均速度比不依靠脊柱支撑简单地蹒跚前进要快 30%。
尽管仍处于早期阶段,研究人员认为,进一步优化设计并将脊柱系统集成到未来的四足机器人中,将极大地提高其功能性。如果 NeRmo 还不能证明这一点,不妨这样想——MIT 的“猎豹”机器人仅通过一个模仿矢状面脊柱屈曲的驱动关节就能以每秒 13 英尺的速度奔跑。而 NeRmo 拥有八个关节。
