
麻省理工学院的研究人员创造了一种微小的、受黄瓜启发而成的软体机器人,它能够使用单个、微弱的磁场在难以到达的三维环境中蹒跚前行。上个月首次在《Advanced Materials》杂志的开放获取论文中详细介绍的,这种由战略性磁化的橡胶聚合物螺旋制成的类似尺蠖的机制在穿梭于人体血管等微小空间方面显示出巨大的潜力。
[相关:海豹为一种新的摇摆机器人提供了灵感。]
在这款最新的“蠕虫机器人”出现之前,运动型软体机器人需要移动的磁场来控制其方向和角度。“如果你想让你的机器人行走,你的磁铁就跟着它一起走。如果你想让它旋转,你就旋转你的磁铁,”该论文的主要作者、材料科学与工程学以及大脑与认知科学教授 Polina Ankeeva 在一份声明中说。“如果你试图在一个非常受限的环境中操作,移动的磁铁可能不是最安全的解决方案,”Ankeeva 补充道。“你想能够拥有一个固定的仪器,它只需对整个样品施加 [一个] 磁场。”
因此,麻省理工学院研究团队的新设计不像许多其他软体机器人那样均匀磁化。通过只磁化选定的区域和方向,仅一个磁场就可以产生“驱动运动的磁力分布”,正如麻省理工学院的公告所说。
有趣的是,工程师们从黄瓜藤卷曲的卷须中获得了灵感:首先将两种类型的橡胶层叠在一起,然后加热并拉伸成细纤维。当新线冷却时,一种橡胶收缩,而另一种则保持其形状,形成一个紧密缠绕的螺旋,就像黄瓜植物的细藤缠绕在附近的结构上一样。最后,将可磁化材料穿过聚合物螺旋,然后进行战略性磁化,以实现多种运动和方向选择。
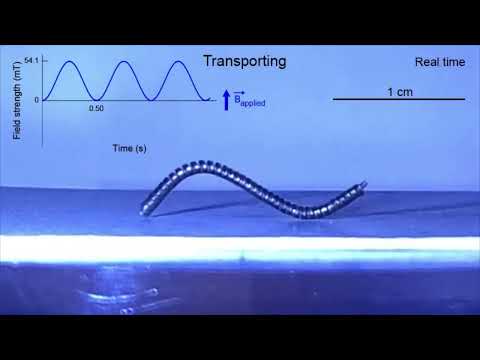
由于每个机器人都具有可定制的磁性模式,因此当多个软体机器人暴露在单个、均匀的弱磁场中时,它们可以被单独映射以向不同方向移动。此外,微妙的磁场操纵可以使机器人振动——从而允许这些微小的蠕虫将货物运送到指定位置,然后通过抖动来递送载荷。由于其柔软的材料和相对简单的操纵,研究人员认为这种机制可以用于生物医学领域,例如通过人体血管缓慢爬行,在精确位置递送药物。
