
四足机器人可以完成许多复杂的任务,但有一个原因就是你很少看到它们在森林或藤蔓丛生的环境中导航。“忙碌”的环境。尽管它们能力超强,但大多数车载人工智能系统在实时应对所有这些物理变量方面仍然很糟糕。对我们来说,这似乎是天生的,但在这种情况下, slightest misstep 就会让 四足机器人 摔倒。
然而,在让自己的机器狗经历了大量的障碍赛跑后,卡内基梅隆大学工程学院的研究团队现在为部署在野外的机器人提供了前进的坚实一步。研究人员表示,教会四足机器人行走时能够主动收腿,为机器人导航和从障碍物中解脱出来提供了最佳步态。
[相关: 研究人员如何训练一个廉价的机器狗做鬼脸。]
“现实世界中的障碍物可能像岩石一样坚硬,也可能像藤蔓一样柔软,我们希望机器人能够制定防止被任何一种障碍物绊倒的策略,”伊利诺伊大学厄巴纳-香槟分校工程学教授兼项目合作者 Justin Yim 在 CMU 最近的亮点 中说道。
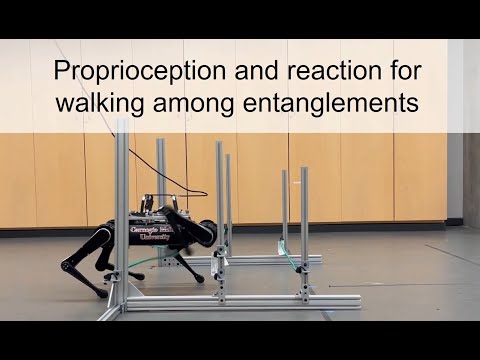
工程师们在四足机器人试图穿越被多根低垂绳索打断的短距离时,比较了多种步态策略。机器人在高抬腿(膝盖向前弯曲行走)时很快就缠住了自己,但在检测到障碍物后立即收起肢体,使其能够平稳地穿过地面。
“当你把机器人带到户外时,与环境互动的所有问题都会呈指数级增长,因为你必须在所做的每件事上都更加谨慎,”机械工程硕士生 David Ologan 告诉 CMU。“你的系统必须足够健壮,能够应对你可能遇到的任何不可预见的. It’s interesting to tackle that problem that hasn’t necessarily been solved yet.” (翻译:能够应对你可能遇到的任何不可预见的. It’s interesting to tackle that problem that hasn’t necessarily been solved yet。) (这句未翻译,原句为“能够应对你可能遇到的任何不可预见的. It’s interesting to tackle that problem that hasn’t necessarily been solved yet。”)
[相关: 这只机器狗学会了新技能——像猫一样保持平衡。]
虽然轮式机器人可能仍然更适合城市环境,那里的地面通常更平坦,并且坡道等基础设施更常见,但步行机器人理论上可能在户外环境中更有用。研究人员认为,将他们的反应性收腿响应集成到现有的 AI 导航系统中,可以帮助机器人在户外搜索和救援任务中。新设计的精巧性也可能有助于四足机器人进行环境勘测,而不会损坏周围环境。
“在室外、植被丰富的环境中, the potential for legged robots is interesting to see,” Ologan said. “If you live in a city, a wheeled platform is probably a better option… There is a trade-off between being able to do more complex actions and being efficient with your movements.” (翻译:Ologan 说:“在室外、植被丰富的环境中, the potential for legged robots is interesting to see。”“如果你住在城市里,轮式平台可能是更好的选择……能够执行更复杂的动作与动作的效率之间存在权衡。”) (这句未翻译,原句为“Ologan said. “If you live in a city, a wheeled platform is probably a better option… There is a trade-off between being able to do more complex actions and being efficient with your movements.””)
