制造一个能游得很好的机器人可能出奇地困难。部分原因在于生物在水中移动的物理学通常很复杂,并且难以复制。但这并没有阻止研究人员研究海洋动物的移动方式,以便他们能够制造出更好的水下机器人。
该领域的一项值得注意的进展来自北卡罗来纳州立大学的工程师们,他们设计了一款类似蝠鲼的机器人,可以做出蝶泳动作。本周,《Science Advances》杂志发表了他们设计的详细描述。
“迄今为止,软体游泳机器人还无法游得比每秒一个身体长度更快,但海洋生物——例如蝠鲼——能够游得更快、更有效率,”北卡罗来纳州立大学副教授、该论文作者之一的Jie Yin在一份新闻稿中表示。“我们希望借鉴这些动物的生物力学,看看我们是否能开发出更快、更节能的软体机器人。”
因此,该团队组装了两个版本的硅胶“蝶泳机器人”:一个可以达到每秒3.74个身体长度的平均速度,另一个则可以急剧向左或向右转弯。两者的大小都约为人掌大小。
与过去使用电机直接操作翅膀的类似生物启发机器人概念不同,北卡罗来纳州立大学团队的机器人通过“双稳态”翅膀拍动,翅膀会像发夹或弹跳玩具一样,咔哒一声固定在两个不同的位置。为了改变弯曲、旋转翅膀的位置,研究人员使用一根软管向机器人身体的上下腔室泵入空气。当腔室充气和放气时,机身会上下弯曲,使翅膀来回拍动。
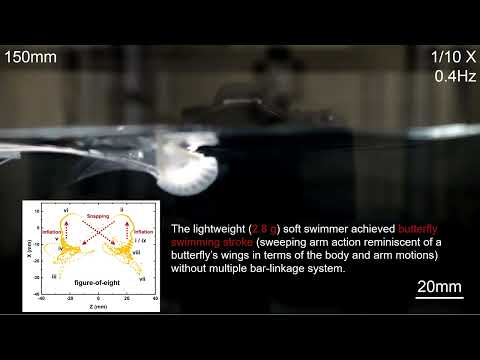
当机器人在水族箱中进行测试时,研究人员发现,给上腔室充气会导致软体躯干向上弯曲,从而产生下击运动。放气后,给下方的气动腔室充气会导致机身向下弯曲,从而产生带有翅膀的上击动作。在从上击到下击的过渡过程中,机器人身体会深入水中,然后向前推进。这种设计使软体机器人更轻便、更节能。
[相关:这款两栖无人机像吸盘鱼一样搭便车]
第一个版本的蝶泳机器人是为了速度而设计的。它配备了控制其两个翅膀的单个驱动单元。第二个版本是为了机动性而设计的。它有两个连接的驱动单元,可以独立控制每个翅膀。只拍动一个翅膀可以更容易地转向。
“这项工作是一个令人兴奋的概念验证,但它也有局限性,”Yin说。“最明显的是,目前的原型受到细细的软管束缚,这是我们用来向中央躯干泵入空气的。我们目前正在开发一种无束缚、自主的版本。”
观看蝶泳机器人的实际运行情况,如下所示