
基于多年的研究以及一些两栖动物的启发,新型四足机器人有一天可能会爬行并扭动身体进入搜救行动。正如最近在Nature Communications 上发表的一篇新论文所述,科罗拉多州立大学的一个团队开发的机器人三胞胎能够根据它们所处环境的障碍物游泳、行走和爬行——这在很大程度上归功于它们轻巧的人工肌肉,不需要沉重车载电源。
[相关:四足机器人有一天可能会探索月球]
这些自 2017 年开始开发的新系统,由 CSU 机械工程系教授 Jianguo Zhao 领导的一个团队设计,它们依赖于根据温度改变刚度的材料。
“我们嵌入式变形方案使用一种类似于人类肌肉的轻巧人工肌肉,通电时会收缩,”Zhao 在该项目10 月 2 日的公告中解释道。“通过将这些人工肌肉嵌入机器人的脊柱或皮肤中,我们可以实现各种形状类型。总而言之,这种方法为开发能够在困难环境中导航和工作的机器人提供了一条有前途的道路。”
除了电气性能,这些机器人的运动在很大程度上归功于青蛙——或者更确切地说,是青蛙的多个生命阶段。“它们最初是带尾巴的蝌蚪,用于游泳,然后发育出腿,使它们能够跳跃、爬行或游泳,”Zhao 继续说道。“我们从这些转变中汲取灵感,但在机器人中实现动物般的嵌入式形状变形仍然具有挑战性,这也是我们希望这项工作能够继续解决的问题。”
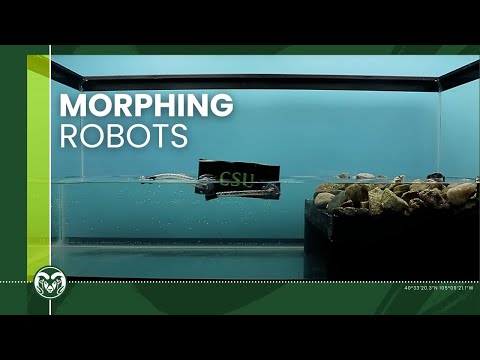
从视频集锦来看,很容易看出青蛙的类比。根据周围环境和地形,机器人可以弯曲肢体进行“游泳”,然后相应地调整它们来爬过模拟海岸线的岩石障碍物。在陆地上,Zhao 的机器人可以通过反复将肢体旋转 360 度来“跳跃”前进。第三种版本的机器人可以变平身体,以便在狭小空间中穿行,还可以挂在岩架上以帮助跨越缝隙。
然而,目前,这些机器人需要远程控制,但未来的迭代可能依赖于基于传感器和摄像头的环境分析来进行导航,甚至可以根据需要变形以适应周围环境。
